游戏测试机器人搭建 - Recv Actor
Recv Actor
Recv Actor 初始化
class RecvActor(pykka.ThreadingActor):
def __init__(self, player=None, sock=None):
super(RecvActor, self).__init__()
self.player = player
self.socket = sock
- 参数传递及调用,在 PlayerActor 里,看图
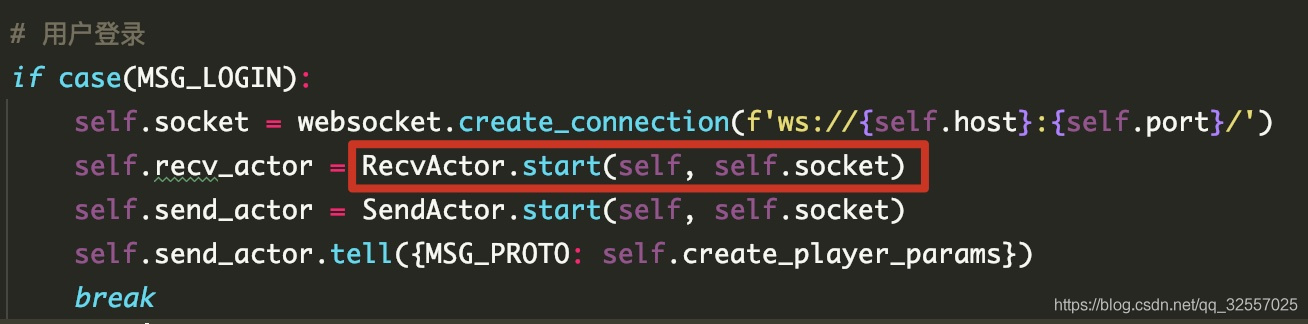
- 传的参数跟 Send Actor 一样
启动 Recv Actor
def on_start(self):
self.on_loop()
- 跟 Send Actor 一样,要先调用这里,在这里启动了循环接收方法,持续接收服务端返回的数据
持续接收服务端数据
def on_receive(self, msg):
self.on_loop()
# sleep一下不然耗性能
time.sleep(0.01)
接收服务端数据进行反序列化
def on_loop(self):
data = self.socket.recv()
data = list(ijson.items(data,''))[0]
proto_id,proto_bin = data['cmd'],data
proto_module = protoFile
proto_cls = getattr(proto_module, str(proto_id).capitalize())
proto_cls_ins = proto_cls()
if hasattr(proto_cls_ins, 'response'):
getattr(proto_cls_ins,'response')(proto_bin)
self.player.send_msg(MSG_PROTO, (proto_id, proto_cls_ins))
else:
self.player.send_msg(MSG_PROTO, (proto_id, proto_cls_ins))
self.actor_ref.tell({'msg': 'loop'})
- socket.recv : 接收服务端的数据
- list(ijson.items(data,''))[0] : 服务端返回的数据是 json,所以我用 ijson 来取值,之前的项目返回的是字节流/二进制流,我是根据协议文档生成对应的 Python 协议解析类来反序列化
- 从 data 取到协议 ID(proto_id) 和协议内容 (proto_bin)
- 检测 (hasattr) 协议模块 (proto_module) 里有没对应的协议,有的话就把该协议实例化,协议模块的协议类定义看下图
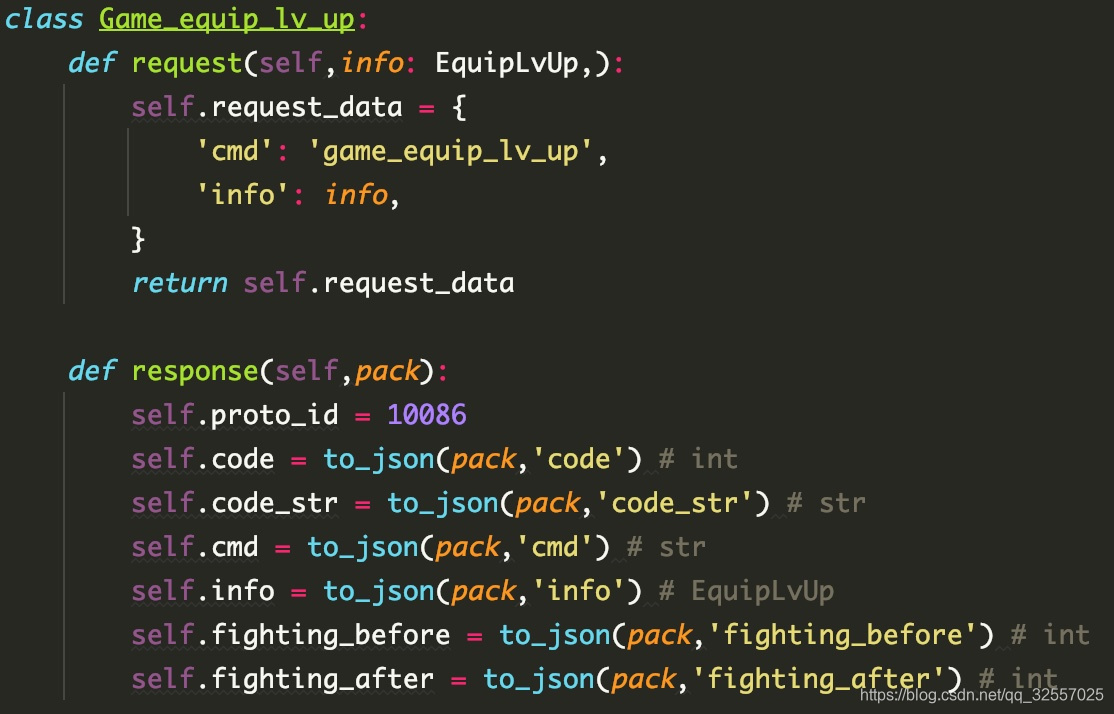
- to_json : 把 dict 里的 value 取出来
- 把反序列化后的协议 ID 和协议发送给 Player Actor 用来做交互处理 (主要是拓展功能用的,proto 模块,后续再写)
- 最后给自己发送一条消息,相当 while 1,一直循环下去
停止 RecvActor
def on_stop(self):
print('RecvActor stop')
- pykka actor 自带的方法,集中在 PlayerActor 的 on_stop 里调用
双是 log 收集
@GetLog(level='error')
def on_failure(self, exception_type, exception_value, traceback):
logging.error(f'RecvActor fail -> {exception_type, exception_value, tb.print_tb(traceback)}')
- log 模块的使用可以参考"官方说明"或者自行百度查询,案例很多
到这里 3 个核心的 Actor 都搭建完毕了,接下来演示下python 编写游戏测试机器人客户端 (四) 玩家登录
最后的最后,各位的关注、点赞、收藏、碎银子打赏是对我最大的支持,谢谢大家!
需要源码的小伙伴关注微信公众号 ID:gameTesterGz
或扫描二维码回复机器人脚本即可
「原创声明:保留所有权利,禁止转载」
如果觉得我的文章对您有用,请随意打赏。您的支持将鼓励我继续创作!