上一篇 - Macaca App Inspector 原理解析
Macaca 提供计算机视觉解决方案,用来处理 View 体系之外的渲染识别问题。如识别测试过程中的截图、辅助测试断言、测试游戏类产品等。另外也会介绍 NodeCV 服务部署,然后便可随时随地使用图形服务。
OpenCV
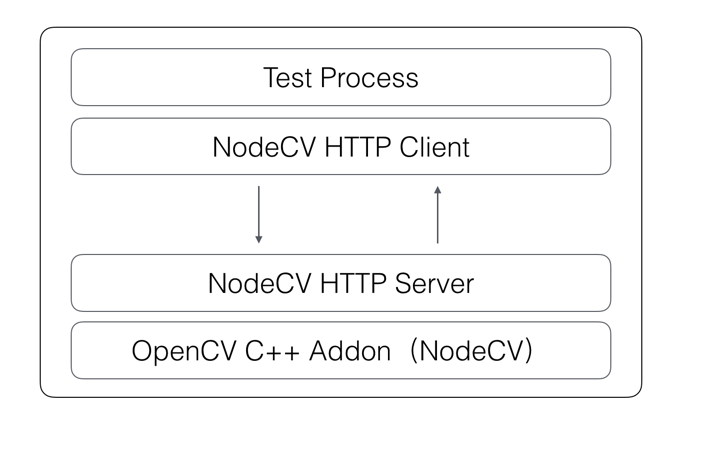
Macaca 选择了集成基于 BSD 许可发行的跨平台计算机视觉库 OpenCV。OpenCV 实现了图像处理和计算机视觉的很多实用算法。OpenCV 提供了多个计算机编程语言的接口,Macaca 选择将 OpenCV 服务化,用户端在运行时直接向指定端口发送指令并在响应中得到结果,方便部署和集成时解耦。配合深度学习,可以在测试行进的过程中也是在收集样本数据,通过大量样本训练算法,断言准确度可以不断被训练提升。
NodeCV
NodeCV 是使用 Node.js 对 OpenCV 在底层做的绑定,主要绑定了以下几个模块与图片识别相关的功能。
- core: 核心功能模块,主要提供对 OpenCV 中最基本数据结构 Mat 的二次封装。
- features2d: 二维图像特征框架,用来完成图像相似度检测。
- highgui: 高级 GUI 和媒体 I/O,这里用来读入和输出目标图片流。
- imgproc: 图片处理模块,如特征检测等,内置了平方差匹配法、归一化平方差匹配法、相关匹配法、归一化相关匹配法、相关系数匹配法、归一化相关系数匹配法。
- objdetect: 对象检测,这里主要使用了级联分类器,可以完成人脸识别等。
这里给出使用频度最高的 imgproc 的绑定示例:
#include "imgproc.h"
using namespace v8;
using namespace std;
void imgproc::Init(Local<Object> target) {
Nan::HandleScope scope;
Nan::SetMethod(target, "matchTemplate", matchTemplate);
Nan::SetMethod(target, "findPairs", findPairs);
};
NAN_METHOD(imgproc::matchTemplate) {
Nan::EscapableHandleScope scope;
Mat *img1 = Nan::ObjectWrap::Unwrap<Mat>(info[0]->ToObject());
Mat *img2 = Nan::ObjectWrap::Unwrap<Mat>(info[1]->ToObject());
/*
TM_SQDIFF =0
TM_SQDIFF_NORMED =1
TM_CCORR =2
TM_CCORR_NORMED =3
TM_CCOEFF =4
TM_CCOEFF_NORMED =5
*/
int method = info[2]->Uint32Value();
Local<Function> cb = Local<Function>::Cast(info[3]);
Local<Value> argv[2];
argv[0] = Nan::Null();
Mat dst;
int result_cols = img1->mat.cols - img2->mat.cols + 1;
int result_rows = img1->mat.rows - img2->mat.rows + 1;
if (result_cols > 0 && result_rows > 0) {
try {
Local<Object> out = Nan::New(Mat::constructor)->GetFunction() -> NewInstance(v8::Isolate::GetCurrent() -> GetCurrentContext()).FromMaybe(v8::Local<v8::Object>());
Mat *dst = Nan::ObjectWrap::Unwrap<Mat>(out);
dst->mat.create(result_rows, result_cols, CV_32FC1);
cv::matchTemplate(img1->mat, img2->mat, dst->mat, method);
cv::normalize(dst->mat, dst->mat, 0, 1, cv::NORM_MINMAX, -1, cv::Mat());
double minVal;
double maxVal;
cv::Point minLoc;
cv::Point maxLoc;
cv::Point matchLoc;
minMaxLoc(dst->mat, &minVal, &maxVal, &minLoc, &maxLoc, cv::Mat());
if (method == CV_TM_SQDIFF || method == CV_TM_SQDIFF_NORMED) {
matchLoc = minLoc;
} else {
matchLoc = maxLoc;
}
dst->mat.convertTo(dst->mat, CV_8UC1, 255, 0);
//detected ROI
unsigned int roi_x = matchLoc.x;
unsigned int roi_y = matchLoc.y;
unsigned int roi_width = img2->mat.cols;
unsigned int roi_height = img2->mat.rows;
v8::Local <v8::Array> arr = Nan::New<v8::Array>(5);
arr->Set(0, out);
arr->Set(1, Nan::New<Number>(roi_x));
arr->Set(2, Nan::New<Number>(roi_y));
arr->Set(3, Nan::New<Number>(roi_width));
arr->Set(4, Nan::New<Number>(roi_height));
argv[1] = arr;
} catch (cv::Exception& e) {
argv[0] = Nan::Error(e.what());
argv[1] = Nan::Null();
}
} else {
argv[0] = Nan::Error("one of the size values (row or column) is lower than 0");
argv[1] = Nan::Null();
}
Nan::TryCatch try_catch;
cb->Call(Nan::GetCurrentContext()->Global(), 2, argv);
if (try_catch.HasCaught()) {
Nan::FatalException(try_catch);
}
return;
}
double imgproc::compareSURFDescriptors(
const float* d1,
const float* d2,
double best,
int length) {
double total_cost = 0;
assert(length % 4 == 0);
for (int i = 0; i < length; i += 4) {
double t0 = d1[i ] - d2[i ];
double t1 = d1[i + 1] - d2[i + 1];
double t2 = d1[i + 2] - d2[i + 2];
double t3 = d1[i + 3] - d2[i + 3];
total_cost += t0 * t0 + t1 * t1 + t2 * t2 + t3 * t3;
if(total_cost > best)
break;
}
return total_cost;
}
int imgproc::naiveNearestNeighbor(const float* vec,
int laplacian,
const CvSeq* model_keypoints,
const CvSeq* model_descriptors) {
int length = (int)(model_descriptors->elem_size / sizeof(float));
int i, neighbor = -1;
double d, dist1 = 1e6, dist2 = 1e6;
CvSeqReader reader, kreader;
cvStartReadSeq(model_keypoints, &kreader, 0);
cvStartReadSeq(model_descriptors, &reader, 0);
for(i = 0; i < model_descriptors->total; i++) {
const CvSURFPoint* kp = (const CvSURFPoint*)kreader.ptr;
const float* mvec = (const float*)reader.ptr;
CV_NEXT_SEQ_ELEM(kreader.seq->elem_size, kreader);
CV_NEXT_SEQ_ELEM(reader.seq->elem_size, reader);
if (laplacian != kp->laplacian)
continue;
d = compareSURFDescriptors(vec, mvec, dist2, length);
if (d < dist1) {
dist2 = dist1;
dist1 = d;
neighbor = i;
} else if (d < dist2) {
dist2 = d;
}
}
if (dist1 < 0.6*dist2)
return neighbor;
return -1;
}
void imgproc::_findPairs(
const CvSeq* objectKeypoints,
const CvSeq* objectDescriptors,
const CvSeq* imageKeypoints,
const CvSeq* imageDescriptors,
vector<int>& ptpairs) {
int i;
CvSeqReader reader, kreader;
cvStartReadSeq( objectKeypoints, &kreader);
cvStartReadSeq( objectDescriptors, &reader);
ptpairs.clear();
for( i = 0; i < objectDescriptors->total; i++) {
const CvSURFPoint* kp = (const CvSURFPoint*)kreader.ptr;
const float* descriptor = (const float*)reader.ptr;
CV_NEXT_SEQ_ELEM(kreader.seq->elem_size, kreader);
CV_NEXT_SEQ_ELEM(reader.seq->elem_size, reader);
int nearest_neighbor = naiveNearestNeighbor(descriptor, kp->laplacian, imageKeypoints, imageDescriptors );
if (nearest_neighbor >= 0) {
ptpairs.push_back(i);
ptpairs.push_back(nearest_neighbor);
}
}
}
void imgproc::flannFindPairs( const CvSeq*, const CvSeq* objectDescriptors,
const CvSeq*, const CvSeq* imageDescriptors, vector<int>& ptpairs ) {
int length = (int)(objectDescriptors->elem_size / sizeof(float));
cv::Mat m_object(objectDescriptors->total, length, CV_32F);
cv::Mat m_image(imageDescriptors->total, length, CV_32F);
// copy descriptors
CvSeqReader obj_reader;
float* obj_ptr = m_object.ptr<float>(0);
cvStartReadSeq(objectDescriptors, &obj_reader);
for (int i = 0; i < objectDescriptors->total; i++) {
const float* descriptor = (const float*)obj_reader.ptr;
CV_NEXT_SEQ_ELEM( obj_reader.seq->elem_size, obj_reader );
memcpy(obj_ptr, descriptor, length * sizeof(float));
obj_ptr += length;
}
CvSeqReader img_reader;
float* img_ptr = m_image.ptr<float>(0);
cvStartReadSeq(imageDescriptors, &img_reader);
for(int i = 0; i < imageDescriptors->total; i++) {
const float* descriptor = (const float*)img_reader.ptr;
CV_NEXT_SEQ_ELEM( img_reader.seq->elem_size, img_reader );
memcpy(img_ptr, descriptor, length*sizeof(float));
img_ptr += length;
}
// find nearest neighbors using FLANN
cv::Mat m_indices(objectDescriptors->total, 2, CV_32S);
cv::Mat m_dists(objectDescriptors->total, 2, CV_32F);
cv::flann::Index flann_index(m_image, cv::flann::KDTreeIndexParams(4)); // using 4 randomized kdtrees
flann_index.knnSearch(m_object, m_indices, m_dists, 2, cv::flann::SearchParams(64)); // maximum number of leafs checked
int* indices_ptr = m_indices.ptr<int>(0);
float* dists_ptr = m_dists.ptr<float>(0);
for (int i = 0; i < m_indices.rows; ++i) {
if (dists_ptr[2 * i] < 0.6 * dists_ptr[2 * i + 1]) {
ptpairs.push_back(i);
ptpairs.push_back(indices_ptr[2*i]);
}
}
}
/* a rough implementation for object location */
int imgproc::locatePlanarObject(
const CvSeq* objectKeypoints,
const CvSeq* objectDescriptors,
const CvSeq* imageKeypoints,
const CvSeq* imageDescriptors,
const CvPoint src_corners[4],
CvPoint dst_corners[4]) {
double h[9];
CvMat _h = cvMat(3, 3, CV_64F, h);
vector<int> ptpairs;
vector<CvPoint2D32f> pt1, pt2;
CvMat _pt1, _pt2;
int i, n, n1, n2;
flannFindPairs(objectKeypoints, objectDescriptors, imageKeypoints, imageDescriptors, ptpairs);
//_findPairs(objectKeypoints, objectDescriptors, imageKeypoints, imageDescriptors, ptpairs );
n1 = objectKeypoints->total;
n2 = imageKeypoints->total;
n = n1 < n2 ? n1 / 2 : n2 / 2;
if ((int)(ptpairs.size()) < n) {
return 0;
}
pt1.resize(n);
pt2.resize(n);
if ((int)ptpairs.size() > n * 2 + 1) {
for (i = 0; i < n; i++) {
pt1[i] = ((CvSURFPoint*)cvGetSeqElem(objectKeypoints,ptpairs[i*2]))->pt;
pt2[i] = ((CvSURFPoint*)cvGetSeqElem(imageKeypoints,ptpairs[i*2+1]))->pt;
}
} else {
return 0;
}
_pt1 = cvMat(1, n, CV_32FC2, &pt1[0]);
_pt2 = cvMat(1, n, CV_32FC2, &pt2[0]);
if (!cvFindHomography( &_pt1, &_pt2, &_h, CV_RANSAC, 5))
return 0;
for (i = 0; i < 4; i++) {
double x = src_corners[i].x, y = src_corners[i].y;
double Z = 1./(h[6] * x + h[7] * y + h[8]);
double X = (h[0] * x + h[1] * y + h[2]) * Z;
double Y = (h[3] * x + h[4] * y + h[5]) * Z;
dst_corners[i] = cvPoint(cvRound(X), cvRound(Y));
}
return 1;
}
NAN_METHOD(imgproc::findPairs) {
Nan::EscapableHandleScope scope;
cv::initModule_nonfree();
Mat *object_mat = Nan::ObjectWrap::Unwrap<Mat>(info[0]->ToObject());
Mat *image_mat = Nan::ObjectWrap::Unwrap<Mat>(info[1]->ToObject());
Local<Function> cb = Local<Function>::Cast(info[2]);
Local<Value> argv[2];
v8::Local<v8::Object> obj = Nan::New<v8::Object>();
if (image_mat->mat.size().width >= object_mat->mat.size().width && image_mat->mat.size().height >= object_mat->mat.size().height) {
try {
IplImage object_mat_temp = object_mat->mat;
IplImage* object_src = &object_mat_temp;
IplImage image_mat_temp = image_mat->mat;
IplImage* image_src = &image_mat_temp;
argv[0] = Nan::Null();
CvMemStorage* storage = cvCreateMemStorage(0);
static CvScalar colors[] = {
{{0,0,255}},
{{0,128,255}},
{{0,255,255}},
{{0,255,0}},
{{255,128,0}},
{{255,255,0}},
{{255,0,0}},
{{255,0,255}},
{{255,255,255}}
};
IplImage* object = cvCreateImage(cvGetSize(object_src), object_src->depth, 1);
cvCvtColor(object_src, object, CV_RGB2GRAY);
IplImage* image = cvCreateImage(cvGetSize(image_src), image_src->depth, 1);
cvCvtColor(image_src, image, CV_RGB2GRAY);
CvSeq* objectKeypoints = 0, *objectDescriptors = 0;
CvSeq* imageKeypoints = 0, *imageDescriptors = 0;
CvSURFParams params = cvSURFParams(500, 1);
double tt = (double)cvGetTickCount();
cvExtractSURF(object, 0, &objectKeypoints, &objectDescriptors, storage, params);
cvExtractSURF(image, 0, &imageKeypoints, &imageDescriptors, storage, params);
tt = (double)cvGetTickCount() - tt;
CvPoint src_corners[4] = {{0,0}, {object->width,0}, {object->width, object->height}, {0, object->height}};
CvPoint dst_corners[4];
IplImage* correspond = cvCreateImage(cvSize(image->width, object->height + image->height), 8, 1);
cvSetImageROI(correspond, cvRect(0, 0, object->width, object->height));
cvCopy(object, correspond);
cvSetImageROI(correspond, cvRect(0, object->height, correspond->width, correspond->height));
cvCopy(image, correspond);
cvResetImageROI(correspond);
if (locatePlanarObject(objectKeypoints, objectDescriptors, imageKeypoints,
imageDescriptors, src_corners, dst_corners )) {
for (int i = 0; i < 4; i++) {
CvPoint r1 = dst_corners[i % 4];
CvPoint r2 = dst_corners[(i + 1) % 4];
cvLine(correspond, cvPoint(r1.x, r1.y + object->height), cvPoint(r2.x, r2.y+object->height), colors[8]);
}
obj->Set(Nan::New("result").ToLocalChecked(), Nan::New<Boolean>(true));
obj->Set(Nan::New("width").ToLocalChecked(), Nan::New<Number>(image->width));
obj->Set(Nan::New("height").ToLocalChecked(), Nan::New<Number>(image->height));
obj->Set(Nan::New("match_x1").ToLocalChecked(), Nan::New<Number>(dst_corners[0].x));
obj->Set(Nan::New("match_y1").ToLocalChecked(), Nan::New<Number>(dst_corners[0].y));
obj->Set(Nan::New("match_x2").ToLocalChecked(), Nan::New<Number>(dst_corners[2].x));
obj->Set(Nan::New("match_y2").ToLocalChecked(), Nan::New<Number>(dst_corners[2].y));
} else {
obj->Set(Nan::New("result").ToLocalChecked(), Nan::New<Boolean>(false));
}
argv[1] = obj;
} catch (cv::Exception& e) {
argv[0] = Nan::Error(e.what());
argv[1] = Nan::Null();
}
} else {
argv[0] = Nan::Error("size error");
argv[1] = Nan::Null();
}
Nan::TryCatch try_catch;
cb->Call(Nan::GetCurrentContext()->Global(), 2, argv);
if (try_catch.HasCaught()) {
Nan::FatalException(try_catch);
}
return;
}

Macaca 集成的功能是 OpenCV 功能集的冰山一角,如需要扩展只需要扩展绑定即可。
光学字符识别
如果需要将图片中的文字 “分离” 出来就需要更专业的 OCR(Optical Character Recognition,光学字符识别),OCR 主要分为文字提取 text extractor 和文字识别 text recognition 两部分。其中比较常见的文字识别库是谷歌开发的 Tesseract,通常与计算机视觉库配合使用。通过 OCR 识别文字的计算成本与直接在元素上获取属性值要高很多,需根据场景权衡。
像素对比
这里指的是基于简单像素的对比,在识别要求不高的场景下,可以直接使用图片像素对比。Image Diff 是个很实用的辅助测试手段,对 UI 进行截图与预期图片对比,可以得出功能测试结果是否符合预期,做法是遍历两个图的所有像素点,对比两个图的对应像素点的像素值是否相同。

- https://github.com/xudafeng/nodecv
- https://github.com/macacajs/nodecv-server
- https://github.com/macaca-sample/cv-sample-python
欢迎讨论,互相学习。
微博: http://weibo.com/xudafeng
Github: https://github.com/xudafeng