class SendActor(pykka.ThreadingActor):
'''
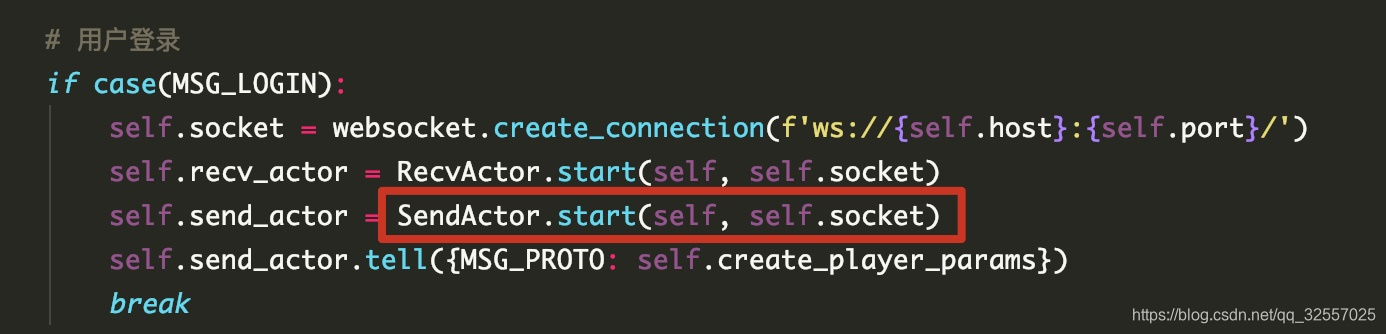
发送消息给服务端
'''
def __init__(self, player=None, sock=None):
super(SendActor, self).__init__()
self.player = player
self.socket = sock
self.wpe = 1
def on_start(self):
self.on_heart()
def on_heart(self):
self.player.sys_count += 1
if self.player.sys_count >= 590:
self.actor_ref.tell({MSG_PROTO: {'cmd': 'hall_heart'}})
self.player.sys_count = 0
# 心跳这里时间会阻塞100毫秒
self.actor_ref.tell({MSG_HEART:{'msg':'loop'}})
time.sleep(0.1)
def on_receive(self, msg):
'''
msg[MSG_PROTO] 打包好的协议数据
发送包有参数的为元组类型,没有参数则直接发送协议
'''
if MSG_PROTO in msg.keys() and msg[MSG_PROTO]:
proto_id, proto_bin = msg[MSG_PROTO]['cmd'],msg[MSG_PROTO]
proto_header = {
'cmd': proto_id,
'sessionId': self.wpe,
'ts':int(time.time()*1000),
}
proto_header.update(proto_bin)
buff = json.dumps(proto_header)
self.socket.send(buff)
elif msg[MSG_HEART]:
self.on_heart()
else:
print('发过来空数据了')
if self.wpe is XXX:
self.wpe = 0
else:
self.wpe = self.wpe + 1
def on_stop(self):
print('SendActor stop')
@GetLog(level='error')
def on_failure(self, exception_type, exception_value, traceback):
logging.error('SendActor fail => ', exception_type, exception_value, tb.print_tb(traceback))
接下来的是 python 编写游戏测试机器人客户端 (三),跟 SendActor 区别在于反序列化服务端的数据
最后的最后,各位的关注、点赞、收藏、碎银子打赏是对我最大的支持,谢谢大家!
需要源码的小伙伴关注微信公众号 ID:gameTesterGz
或扫描二维码回复机器人脚本即可
