作者:京东工业 宛煜昕 ****
扫雷游戏相信很多人都从小玩过,在那个电脑游戏并不多的时代,扫雷成为玩的热度蛮高的一款游戏之一,然而就在有一次,接触到了一次不寻常的扫雷过程,使得后来我也有了这个冲动,也来做一次。通过动态调试,逆向和 C 来写一个扫雷辅助工具从而提高逆向与编码技能。
首先进行扫雷程序的动态调试(分析):
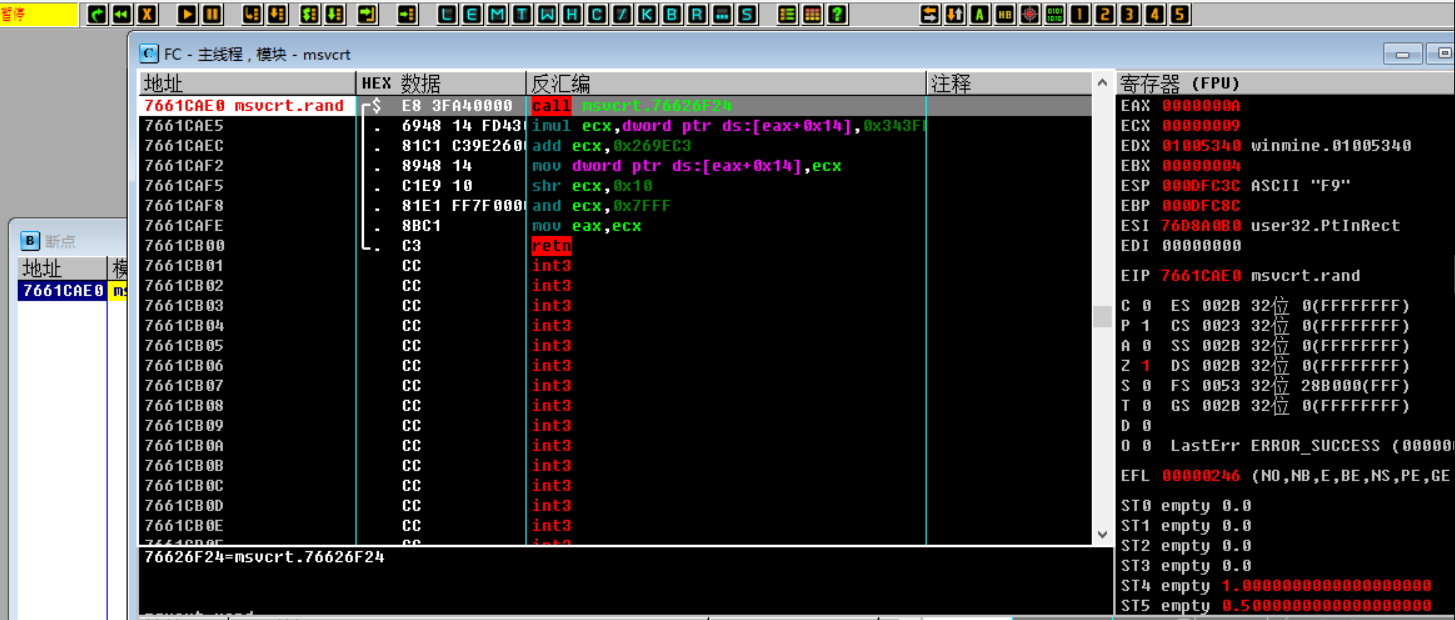
打开 OD(ollydebug 工具),把扫雷拖放到 OD 中,F9 运行;ctrl+G 输入要跟随的表达式,输入 rand,点击【确定】,跳转到该函数调用处,F2 设置断点,此次是想通过 API rand 函数来找寻突破口。在扫雷窗口的雷区中任意点击一个位置(图片中出现 2 的位置),再点击还原(【笑脸】按钮-),如下图:
此时 OD 会在刚设置的 rand 处的断点断下来,如下图:
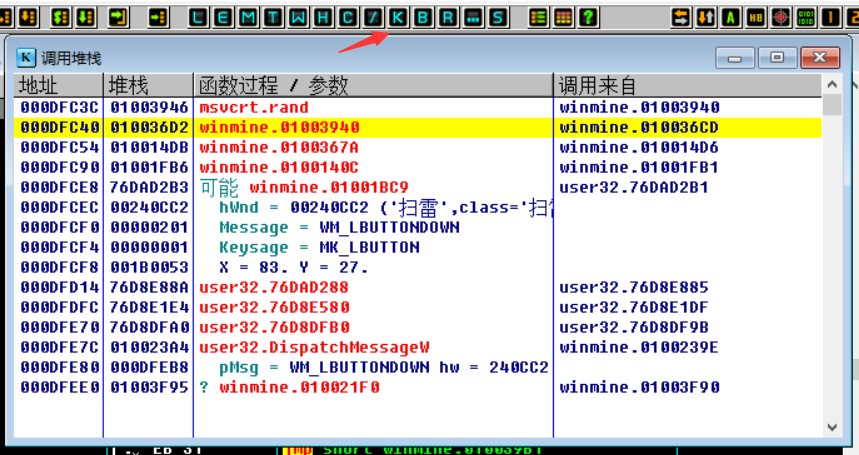
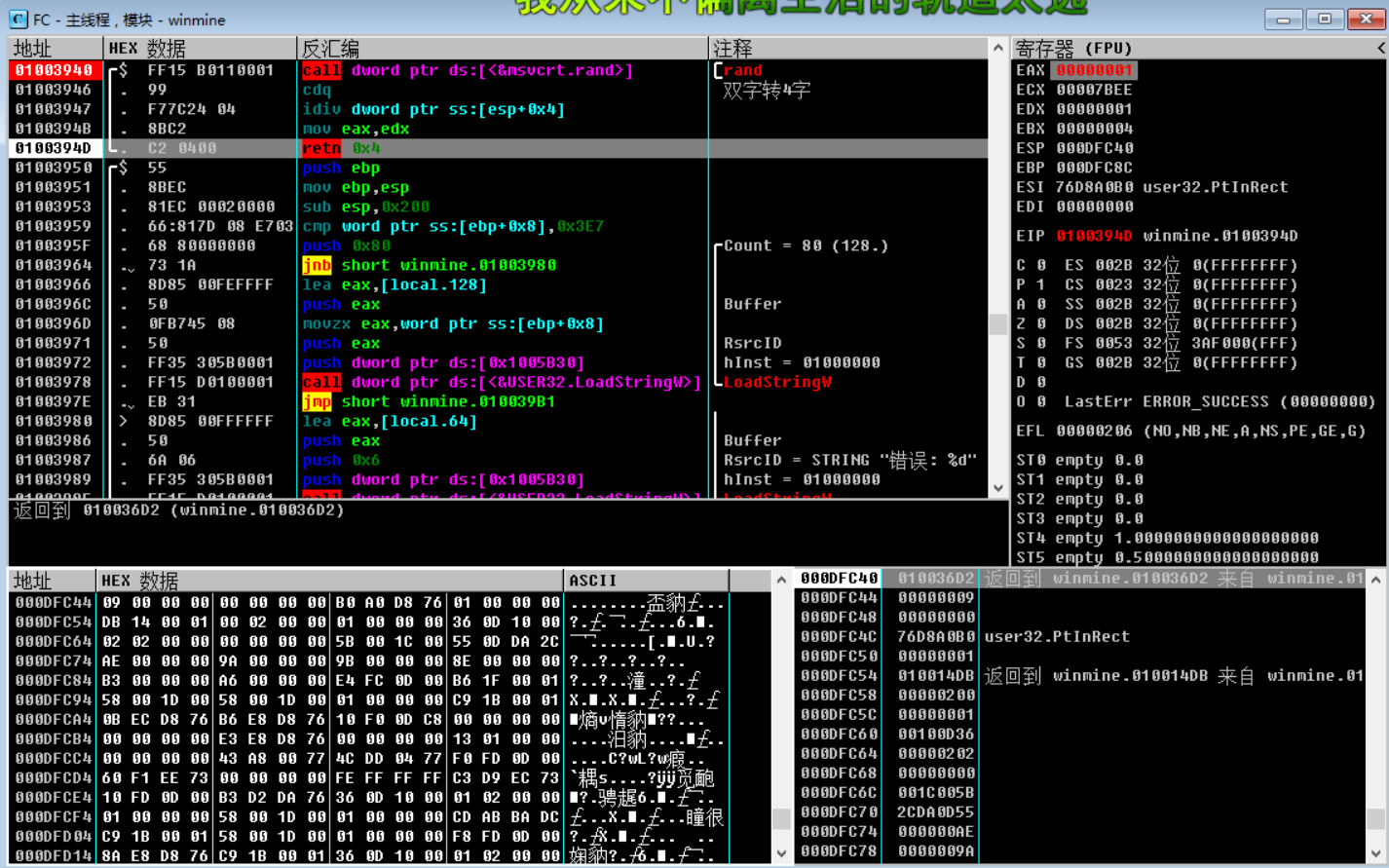
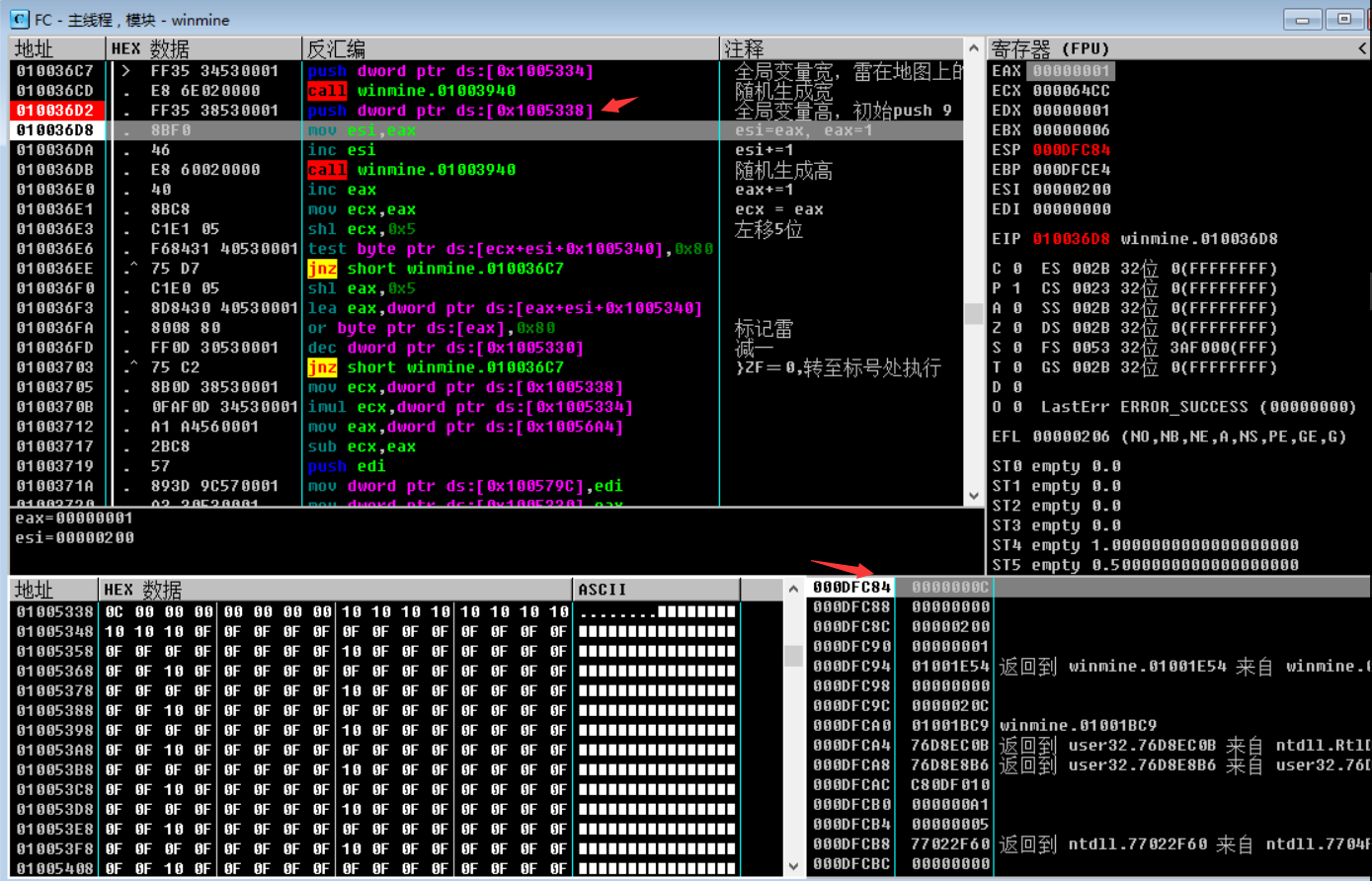
通过找到随机函数 rand,下面进行栈回溯,回到上级函数中,来找到 push(压入栈)的参数,也就是说随机生成函数(rand)是随机生成的高,宽,雷数。点击 K(调用堆栈),弹出 K 调用堆栈窗口,查看堆栈窗口信息,找到返回地址,双击 K 调用堆栈窗口中的返回地址,返回到上一层,此过程称为栈回溯。仔细观察下图的堆栈信息 010036D2(返回地址)。

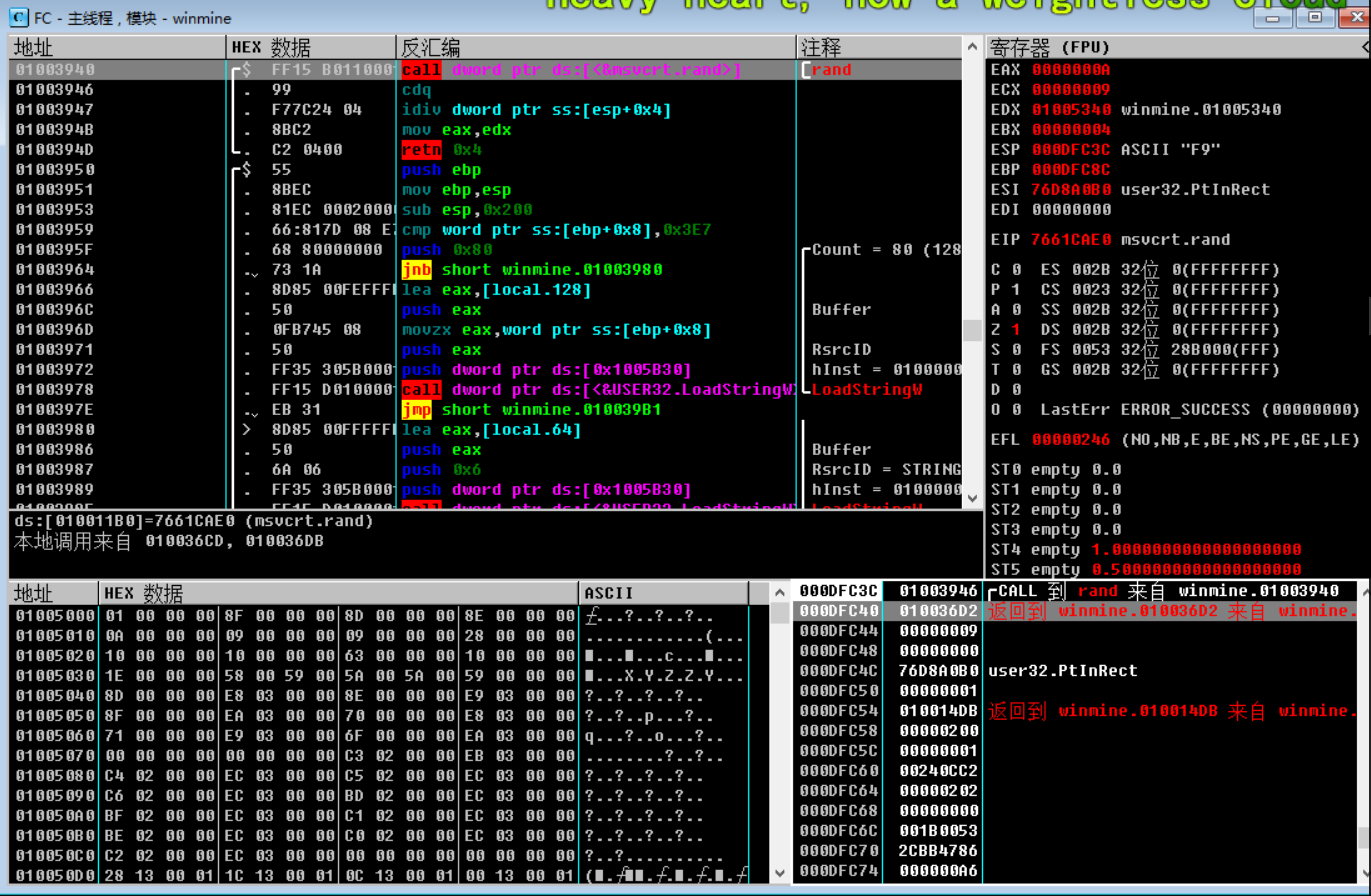
单步 F8,观察寄存器,数据窗口和堆栈窗口变化,dword ptr ss:[esp+0x4] 或 dword ptr ds:[XXX] 数据窗口跟踪数值(000DFC44 值是 09),如下图:
返回到上层函数后,分析这里面的指令,得知刚才随机 rand 生成的宽(09),如下图,注意观察地址 010036C7。
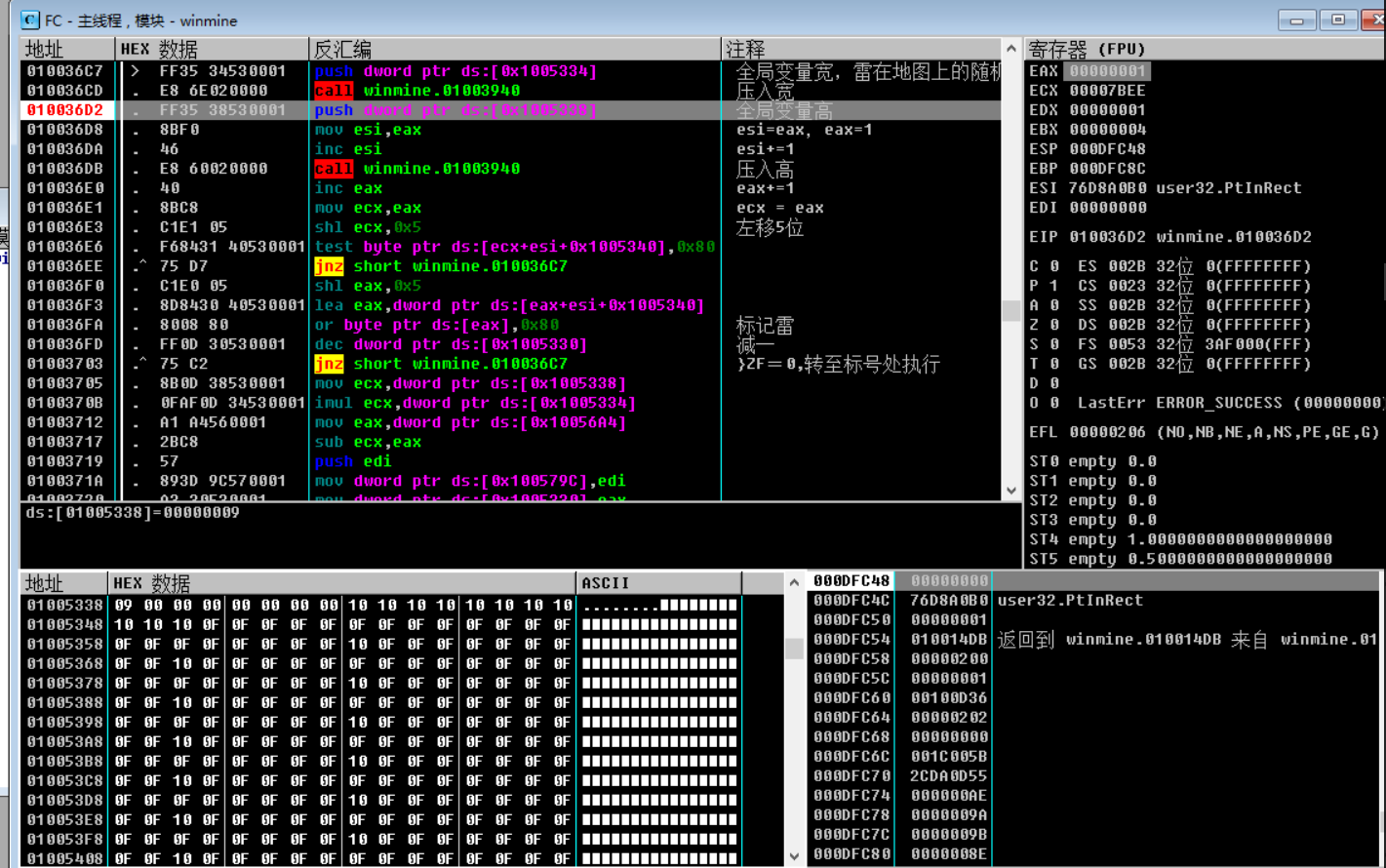
首先从这个函数返回的结果着手分析 eax,单步后,可以看到往堆栈中(地址 010036D2)压入了一个数字 09,如下图:
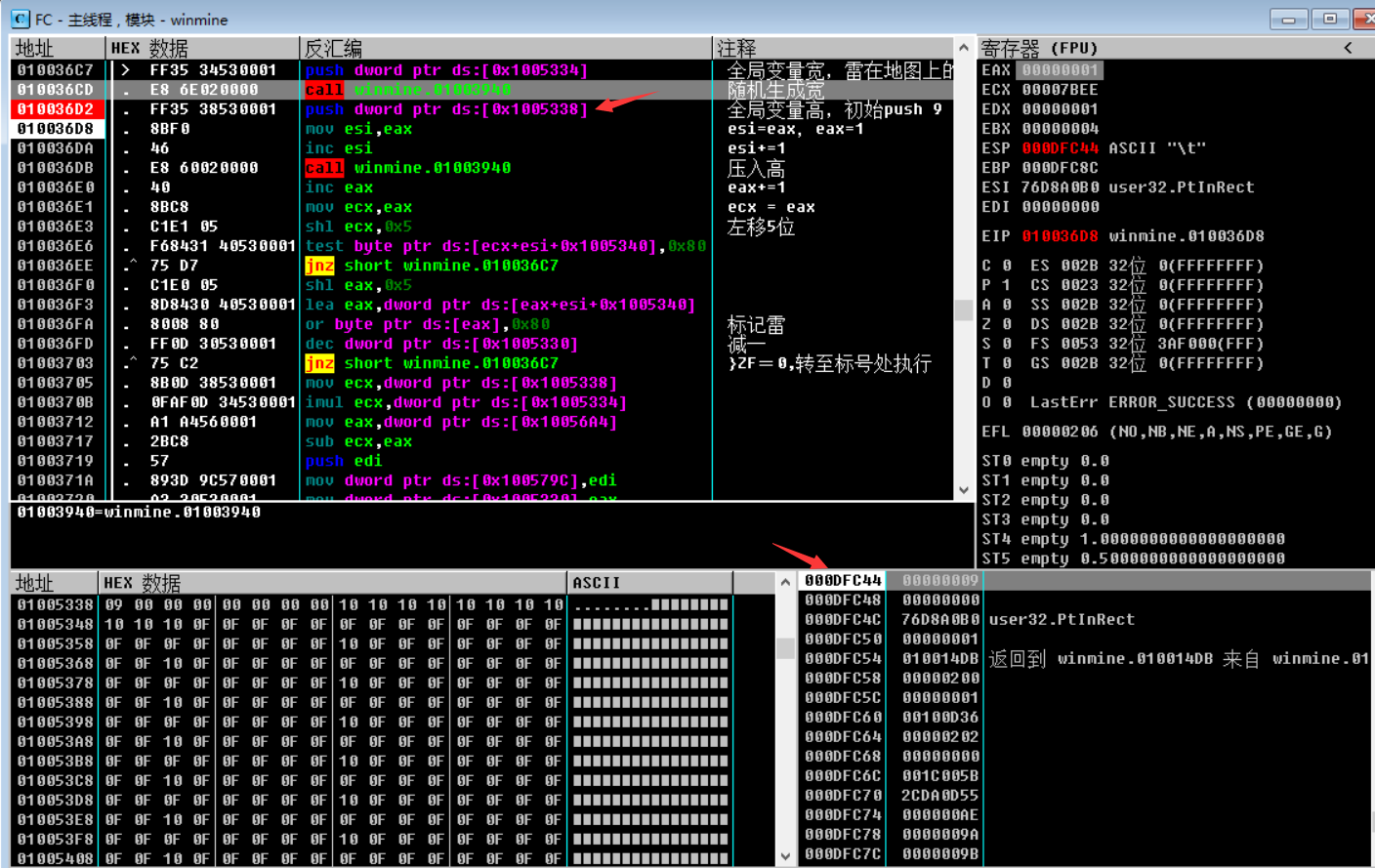
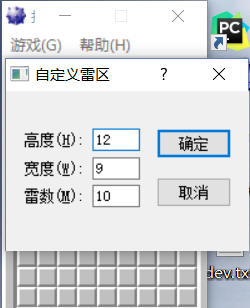
通过以上分析,基本可以猜测得到周边的随机函数 rand 生成是高,雷数。可以试着改变扫雷设置(自定义雷区),如下图,来准确定位 rand 函数及传参,点击【确定】,再点击【还原(笑脸-)】按钮。
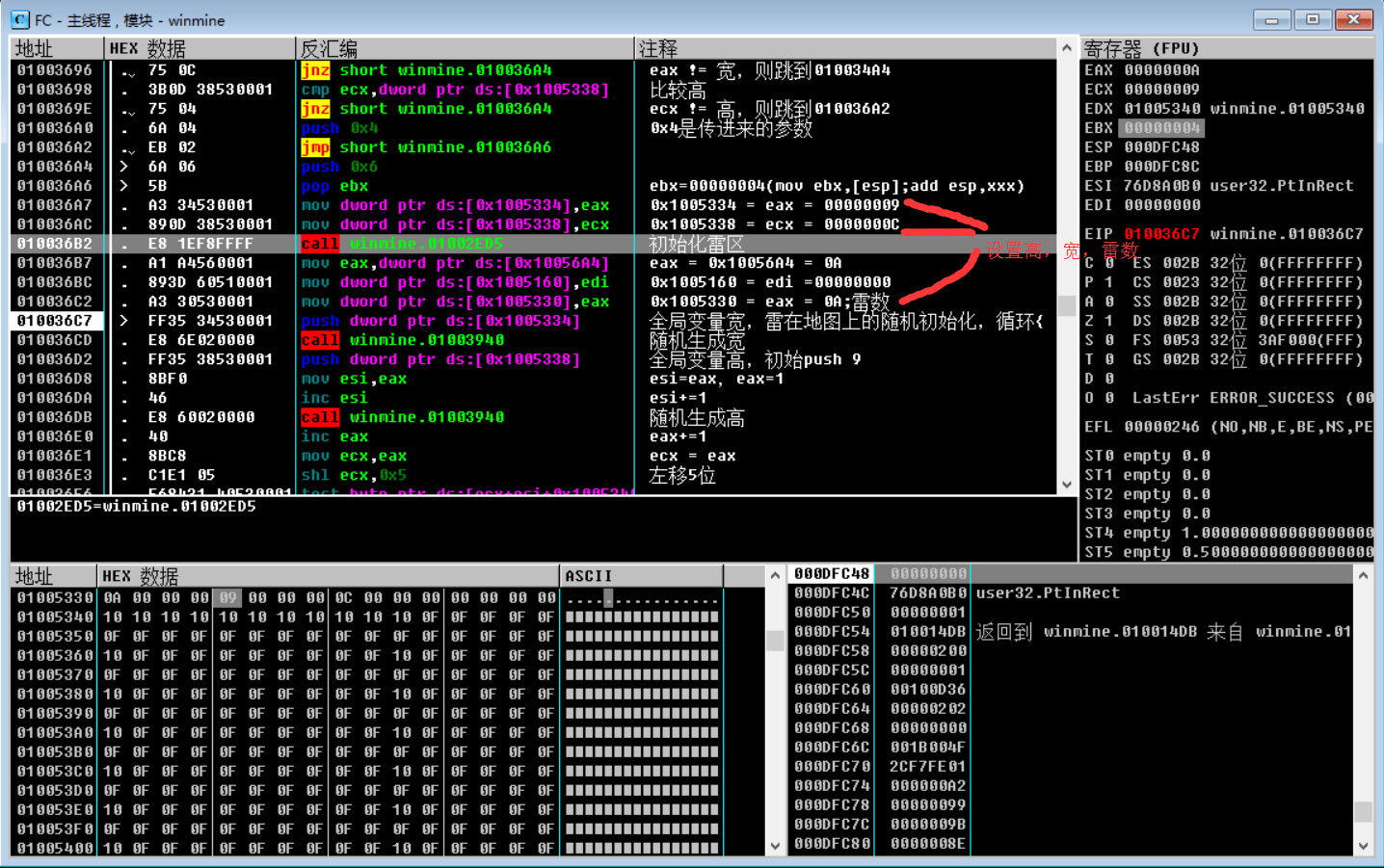
观察 OD,如下图:
发现 push 0C(000DFC84 值为 0C),可以确定这个 rand 函数 push 0C 就是雷区的高度。同时在内存区域也能明确看到一个大致的雷区图形,通过以上方法,大致可以猜测 0x80 就是雷。或者与 IDA 共同分析,通过静态分析,可以更直观的看到程序逻辑。得到如下数据:基地址,雷数等信息,如下图:
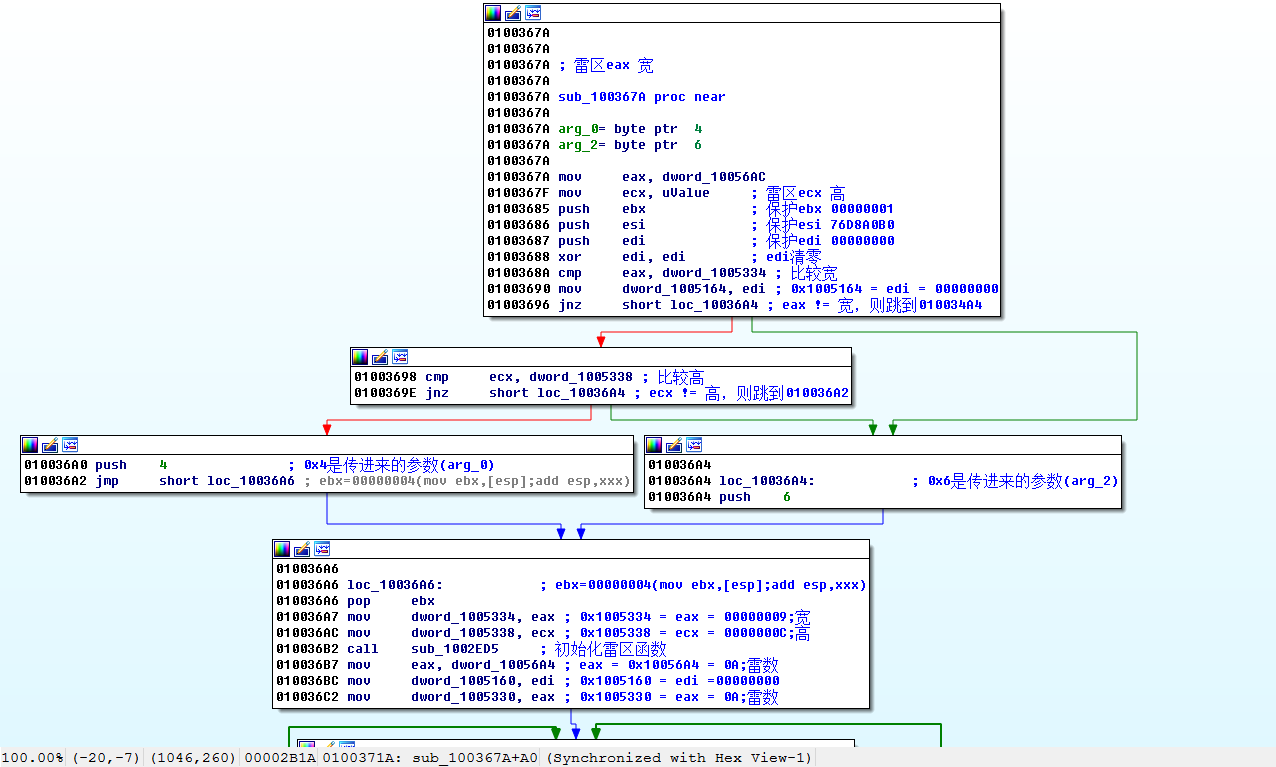
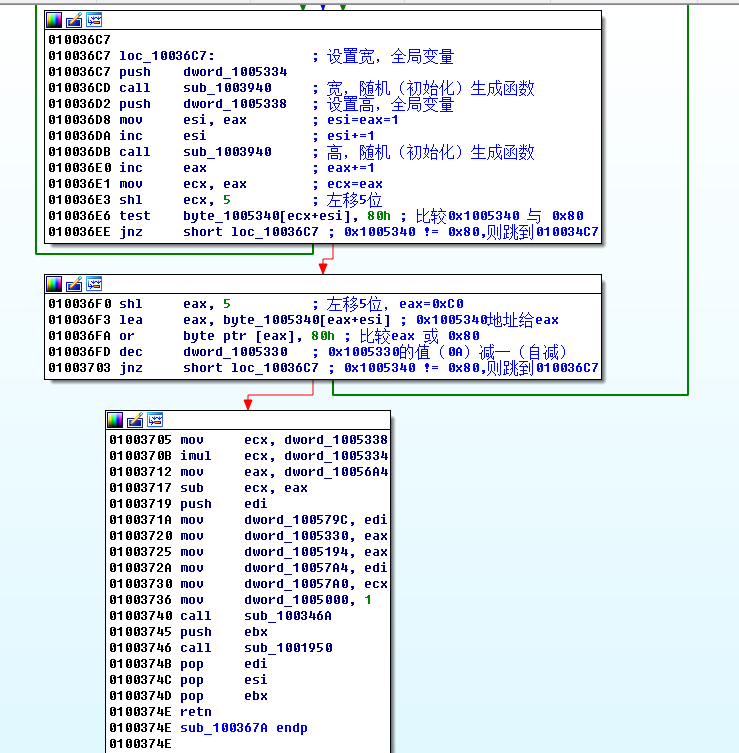
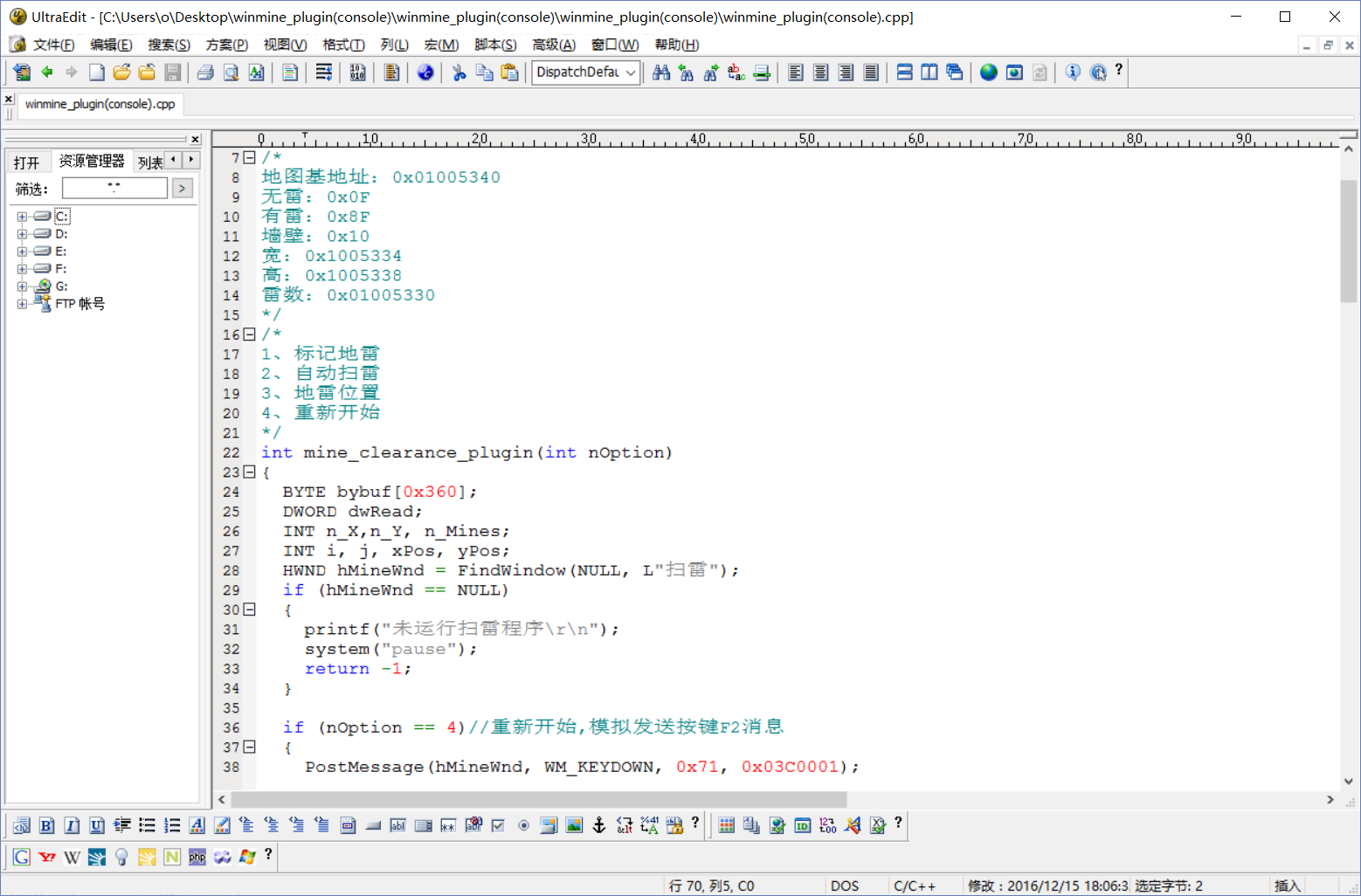
以上代码大概意思是先设置了全局宽 0x09,高 0x0C,雷数 0x0A 的变量,通过判断两层循环,随机生成了宽和高。得地图基地址:0x01005340。通过分析下图得知无雷是 0x0F,有雷是 0x8F,墙壁是 0x10。
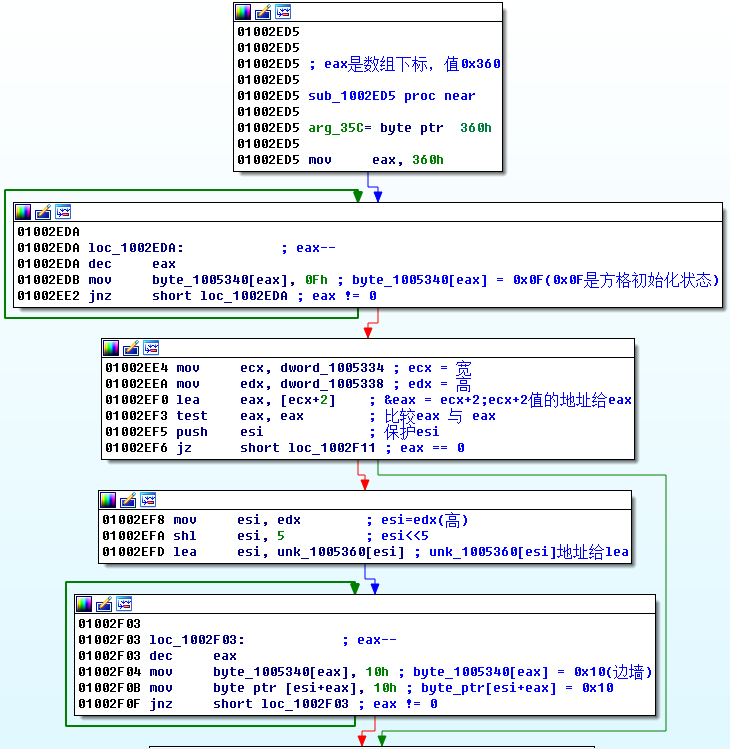
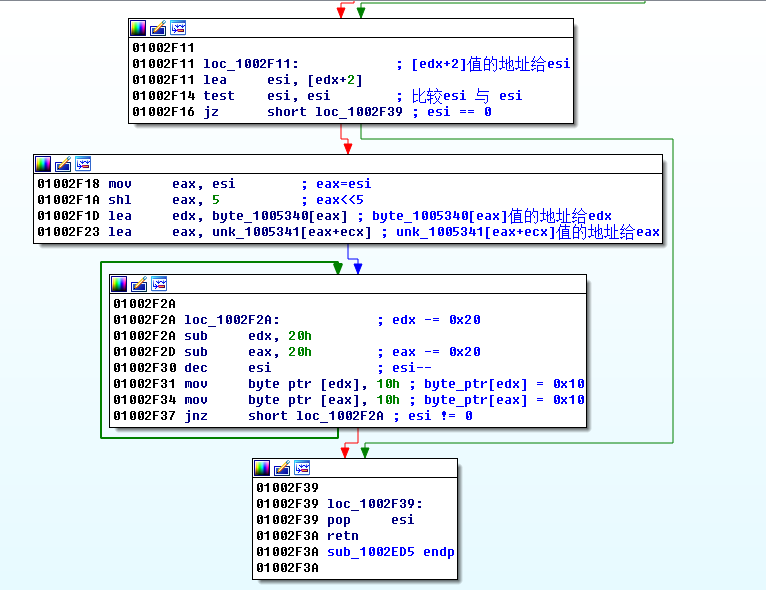
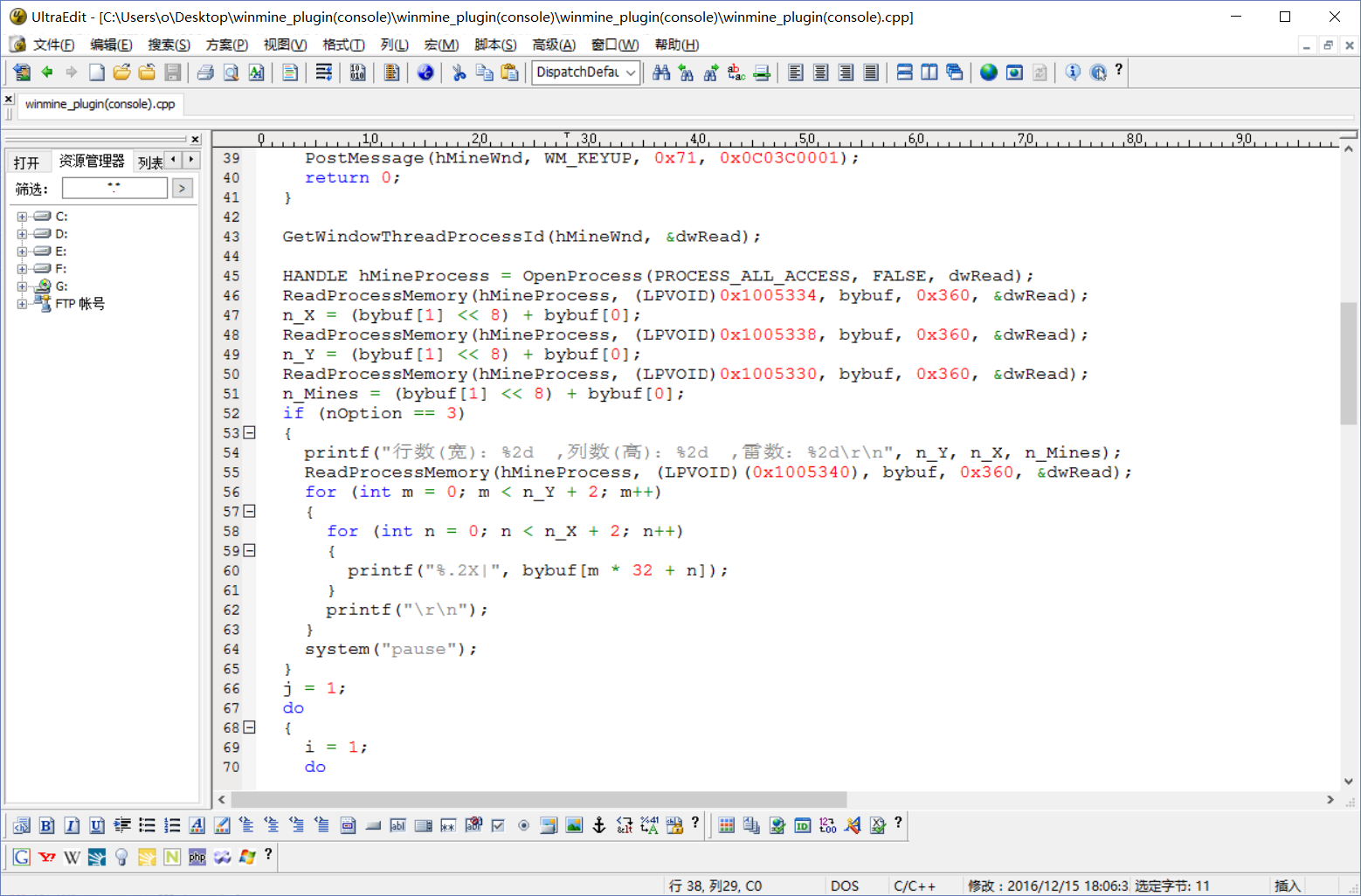
通过宽,高的地址,打印出扫雷区域和雷数,并可以更直观的区分边墙,雷。
下面开始要想如何标记雷了,通过假设 WinProc(通过栈回溯到消息回调函数)中看到有关 GetDC 函数,大致猜测会用到 Bitblt,在 OD 中 ctrl+g 输入要跟随的表达式,录入 “BitBlt”,按 F2 设置断点,点击扫雷区域任意一个位置,OD 会断在 BitBlt 位置。
在 BitBlt 中还有一个 BitBlt 函数,初步判断觉得是用双缓冲方式绘图,
BitBlt(hDestDC,//目的 DC XDest, // 目的 x 坐标 YDest, // 目的 y 坐标 10, // 10, // 重绘区域的高和宽 hSrcDC, // 源 DC 0, 0, SRCCOPY);// 指定操作方式计算雷的坐标(点击第一个扫雷的方块,查看坐标),需要注意边墙,如下图:
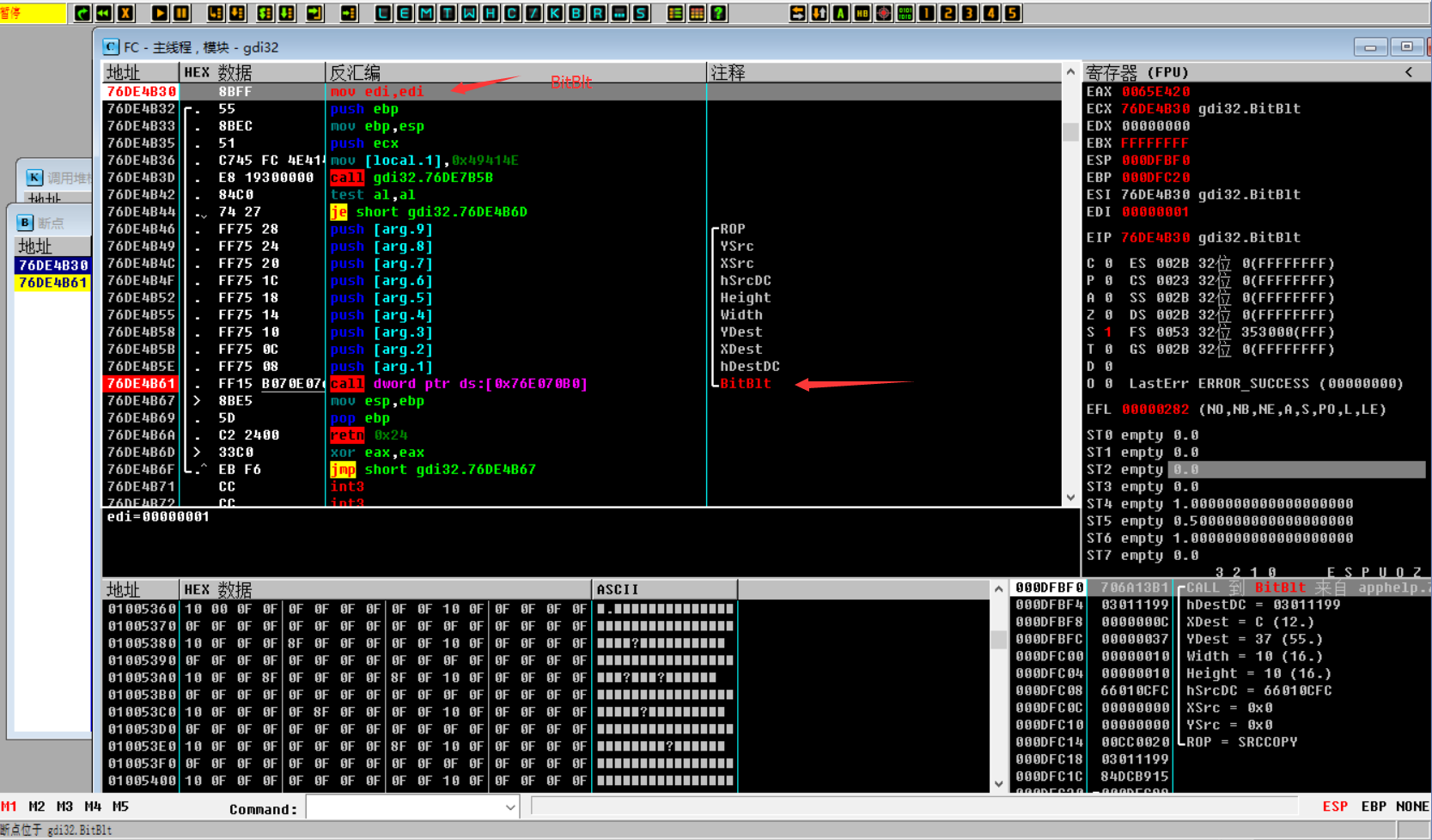
减去边墙的值:
-0x04=0x0C(12)-0x10(16)
0x27=0x37(55)-0x10(16)
得到坐标公式:x(XDest:12)=1*0x10(16)-0x04(4),y(YDest:55)=1*0x10(16)+0x27(39)。
通过以上大致的分析,可进行代码的编写了,
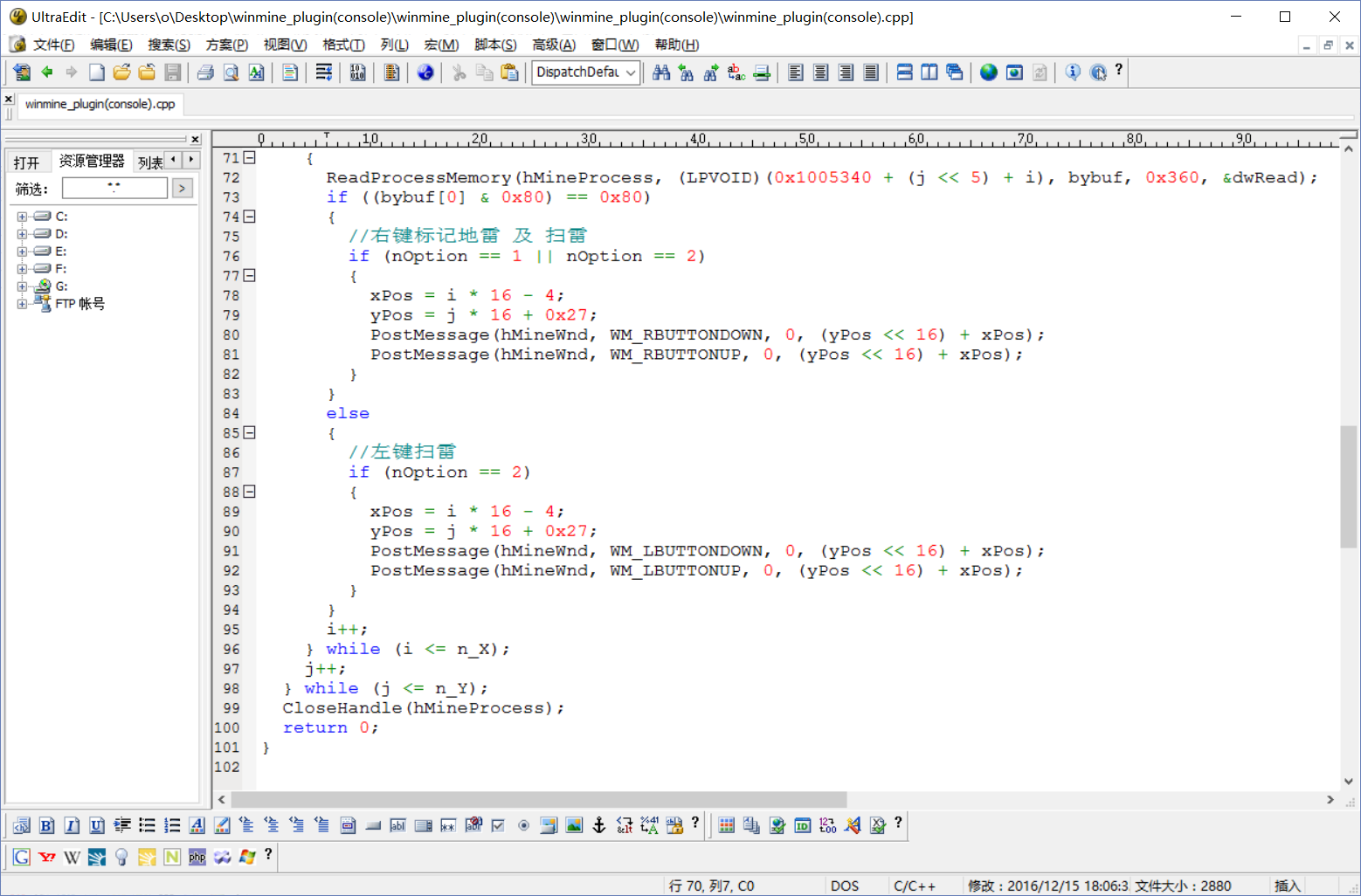

输入 3landmine 位置,获取出 landmine(10 墙壁,8Flandmine,0F 无雷)
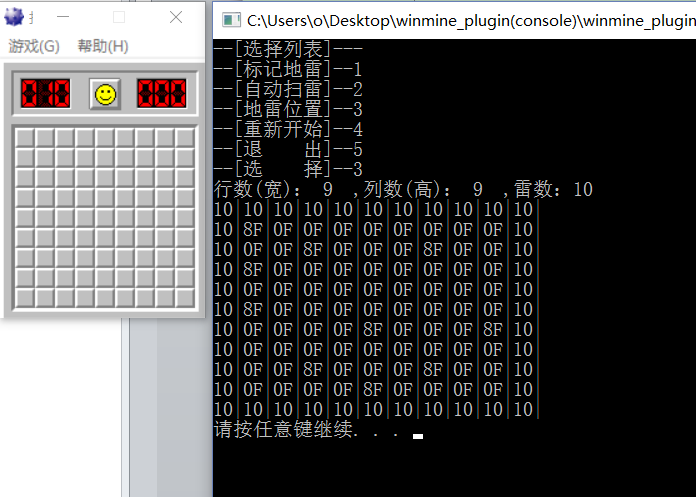
输入 2 自动扫雷,标记雷并开出地图

通过这个小项目,首先加强了对软件的一种逆向思维,如:看到这一种面板,大概猜到是用数组来实现的,其次雷的布局是随机生成的,然后通过动态调试可以了解实现方法(开发者的一种实现思路),可找到关键的基地址,几种状态(无雷,有雷,墙壁),最后编码阶段可以理解内存的操作,几个重要的 API,FindWindow 获取句柄,OpenProcess 打开句柄,ReadProcessMemory 读取内存信息,PostMessage 异步消息模式,CloseHandle 关闭句柄。其中有一些分析有误或不到位的地方还请拍砖。多逆向,分析代码有很多帮助,不仅可以拓宽自己编程与测试的思维及水平,还能发现,开发及利用程序中的漏洞或给程序打补丁等。希望小伙伴们在这条任重而道远的路上加油,互勉。
